Pergala barkirina rêyên bêmirov ji bo kanên binerd

Fonksiyonên pergalê
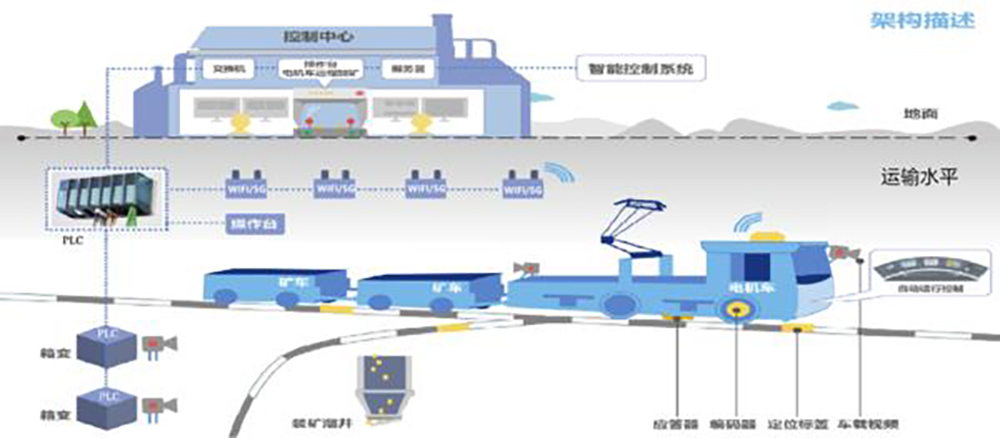
Pergala lokomotîva elektrîkê ya bê ajokar ji pergala kontrola operasyona otomatîk (ATO), yekîneyek kontrolê ya PLC, yekîneyek pozîsyona rast, yekîneyek belavkirina hişmend, yekîneyek tora ragihandinê ya bêserûber, yekîneya kontrolkirina girtina navendî ya sînyala veguherînê, çavdêriya vîdyoyê û AI-ya vîdyoyê pêk tê. sîstem, û navendek kontrolê.
Danasîna kurt a fonksiyonê
Operasyona rêwîtiya bi tevahî otomatîk:li gorî teoriya rêwîtiya bilez a sabît, li gorî rewş û hewcedariyên rastîn li her xalek asta veguheztinê, modela gerîdeya wesayîtê tête çêkirin da ku rastkirina xweseriya leza rêwîtiyê ya lokomotîfê pêk bîne.
Pergala pozîsyona rastîn:pozîsyona rastîn a lokomotîfê bi teknolojiya ragihandinê û teknolojiya naskirina tîrêjê, û hwd., Bi rakirina kevana otomatîk û verastkirina leza xweser ve tête bidestxistin.
Dabeşkirina hişmend:Bi berhevkirina daneyan wekî asta maddî û pola her çîçekê, û dûv re li gorî pozîsyona rast û rewşa xebitandinê ya her lokomotîfê, lokomotîf bixweber ji bo xebatê tê destnîşankirin.
Barkirina desta ji dûr ve:Bi kontrolkirina alavên barkirinê ve barkirina desta ji dûr ve dikare li ser rûyê erdê were bidestxistin.(Pergala barkirina bi tevahî otomatîk vebijarkî)
Tespîtkirina asteng û parastina ewlehiyê:Bi lêzêdekirina amûrek radarê ya pêbawer li pêş wesayitê ji bo bidestxistina tespîtkirina mirov, wesayit û kevirên ketina li ber wesayitê, ji bo misogerkirina dûrahiya ewle ya wesayitê, wesayit bi rengek xweser gelek xebatan wekî dengdanê temam dike. horn û braking.
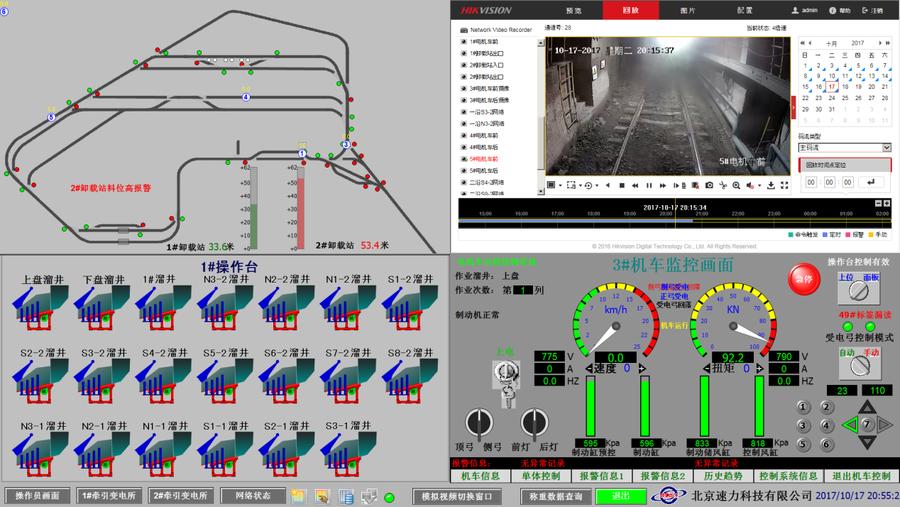
Fonksiyona statîstîkên hilberînê:Pergal bixweber analîzên statîstîkî yên parametreyên xebitandina lokomotîfê, rêgezên xebitandinê, têketinên fermanê û qedandina hilberînê dike da ku raporên xebitandina hilberînê pêk bîne.
Nîşaneyên pergalê.
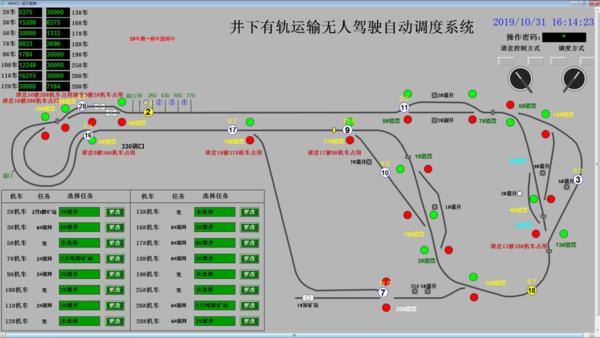
Operasyona otomatîkî ya pergalên veguheztina hesinî ya binerd.
Ji bo lokomotîva hilbijartî ya binerdê ya bê ajokar, şêwazek nû ya xebitandinê pêşengtiyê dike.
Pêkanîna rêveberiya torê, dîjîtal û dîtbar a pergalên veguheztina trêna binerd.

Analîziya Feydeya Bandora Pergalê
Di binê erdê de bê şopandin, şêwazên hilberînê xweşbîn dike.
Hêsankirina hejmara kesên dixebitin û kêmkirina lêçûnên kedê.
Başkirina jîngeha xebatê û zêdekirina ewlehiya hundurîn.
Mekanîzmayên xebitandinê yên zîrek ji bo birêvebirina guhertinê.
Feydeyên aborî.
-Kêrhatîya bicîanîn:bi yek lokomotîfê hilberîneriyê zêde kir.
Hilberîna stabîl bi belavkirina madenê aqilmend.
-Sûxrekar:ajokarê lokomotîfê û operatorê berdana madenê di yek de.
Karkerek dikare gelek lokomotiv kontrol bike.
Kêmkirina hejmara personelên di mewziyan de li nuqteya daxistina madenê.
-Xemil:kêmkirina lêçûna destwerdana mirovan a li ser amûran.
Feydeyên rêveberiyê.
Analîzkirina daneyên alavan da ku karûbarê pêş-xizmetkirina alavan bike û lêçûnên rêveberiya alavan kêm bike.
Modelên hilberînê çêtir bikin, karmendan xweş bikin û lêçûnên rêveberiya karmendan kêm bikin.





